AUTOMATINĖS SISTEMOS CHARAKTERISTIKŲ KOMPENSAVIMAS



Detali informacija
Ištrauka
8 laboratorinis darbas
AUTOMATINĖS SISTEMOS CHARAKTERISTIKŲ KOMPENSAVIMAS
Darbo tikslas: Ištirti kokią įtaką kompensuojamos sistemos valdymo vyksmo statinėms bei
dinaminėms charakteristikoms turi skirtingi reguliatoriai ir jų parametrai.
Teorinė dalis: Pagrindinis kiekvienos automatinės sistemos projektavimo tikslas –
užtikrinti, kad būtų tenkinami visi reikalavimai sistemos funkcionavimo kokybei. Šie
reikalavimai paprastai išreiškia tam tikrus apribojimus sistemos valdymo vyksmui, taigi ir jos
reakcijos kokybinėms charakteristikoms. Reikalaujamos kokybinės charakteristikos bendruoju
atveju apibrėžia šias svarbiausias dinaminės sistemos savybes:
reakcijos greitį arba sistemos greitaveiką;
santykinį stabilumą arba stabilumo atsargą;
valdymo tikslumą arba leistinąją paklaidą.
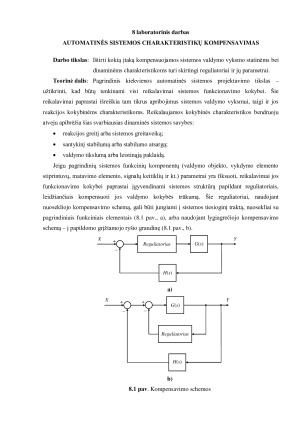
Jeigu pagrindinių sistemos funkcinių komponentų (valdymo objekto, vykdymo elemento
stiprintuvų, matavimo elemento, signalų keitiklių ir kt.) parametrai yra fiksuoti, reikalavimai jos
funkcionavimo kokybei paprastai įgyvendinami sistemos struktūrą papildant reguliatoriais,
leidžiančiais kompensuoti jos valdymo kokybės trūkumą. Šie reguliatoriai, naudojant
nuosekliojo kompensavimo schemą, gali būti jungiami į sistemos tiesioginį traktą, nuosekliai su
pagrindiniais funkciniais elementais (8.1 pav., a), arba naudojant lygiagrečiojo kompensavimo
schemą – į papildomo grįžtamojo ryšio grandinę (8.1 pav., b).
Mūsų mokslo darbų bazėje yra daugybė įvairių mokslo darbų, todėl tikrai atrasi sau tinkamą!
Panašūs darbai











Svetainė naudinga. Visada galima rasti medžiagos ir pritaikyti rašant darbus.

Platus pasirinkimas, didelė pagalba mokantiems ir besimokantiems, leidžia sutaupyti laiką ir pasisemti naujų idėjų. Ačiū

Labai gera svetainė,kai nėra idėjų referatui ši svetainė labai padeda.

Gali rasti naudingos medžiagos. Reikalui esant ją persitvarkyti pagal save. Ačiū

Ačiū, kad esat.Didelis pasirinkimas. Mielai naudojuosi. Labai susitaupo laikas.

Puiki svetainė, gerai, kad yra iš kur pasisemti pavyzdžių, kai galva jau nebeveikia :)