PWM signalai ir įrangos valdymas







Detali informacija
Ištrauka
LABORATORINIS DARBAS
PWM SIGNALAI IR ĮRANGOS VALDYMAS
Darbo tikslas
Išmokti formuoti PWM signalus ir jais valdyti įrangą.
Teorinė dalis
Pulse Width Modulation (PWM) - impulso pločio moduliacija. Arduino su
atmega328 mikrovaldikliu gali generuoti 6 tokius signalus, nenaudojant CPU skaičiavimo
pajėgumų. Arduino turi tik vieną funkciją šio signalo valdymui - analogWrite(impulso plotis).
Nors signalas yra nesudėtingas, tačiau plačiai naudojamas: Skaičius-analogas
keitikliuose (sintezuojant garso ir kitokius signalus), elektromobiliuose, dronuose, liftuose ir dar
daug kur. Pavyzdžiui garso sintezėje greitai (labai greitai) keičiant impulso plotį ir integruojant
(filtruojant) šį signalą gaunamas analoginis (egzistuojantis bet kuriuo laiko momentu ir turintis
bet kokią norimą amplitudę) signalas.
Žmogaus juslės (pvz. rega) pažymi signalo integravimo savybėmis, todėl gamintojai net
nesivargina (taupo) filtruoti PWM signalus. Pavyzdžiui LCD monitoriai su LED pašvietimu. Čia
LED yra valdomi PWM signalu, be filtravimo (akis pati nufiltruos), reguliuojant ekrano
ryškumą (skaistį). Lygiai taip pat, paprasčiausi nuolatinės srovės varikliai ar daugiafaziai
bekolektoriniai varikliai (tokie naudojami kokybiškesniuose dronuose) yra valdomi nefiltruotais
PWM signalais. Varikliai yra masyvūs ir negali staigiai sureaguoti į greitą signalo pokyti, todėl
pasižymi filtravimo (integravimo) savybe. Tačiau tokiu atveju variklių mechaninės dalys pradeda
rezonuoti žemuose dažniuose ir mes girdime triukšmą. Ar nors kartą girdėjote tyliai skrendantį
droną?
Servo varikliai yra skirti valdyti mechaninių elementų padėtis. Jų ašis gali pasisukti tik
iki 180°. Jie naudojami vaizdo kamerų pakreipimo mechanizmuose, lėktuvų modeliuose,
dronuose, robototechnikoje, ir t.t.
Žemiau įdėjau paveikslus kurie vaizduoja mažiausią ir pigiausią servo variklį bei tokio
variklio supaprastintą konstrukciją ir veikimo principą.
Servo varikliai yra valdomi PWM signalais. Tik šių signalų dažnis yra fiksuotas - 50
Hz, o impulso plotis kinta siaurame diapazone 0,5-2,5 ms.
Standartinis Arduino PWM signalas šiam tikslui netinka, tačiau pats mikrovaldiklis kuo
puikiausiai gali vienu metu valdyti mažiausiai 6 tokius variklius. Šiam tikslui yra sukurta
biblioteka.
Užduotis
NB. Užsirašykite atliekamus žingsnius ir pastabas.
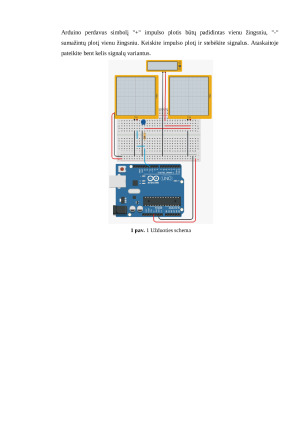
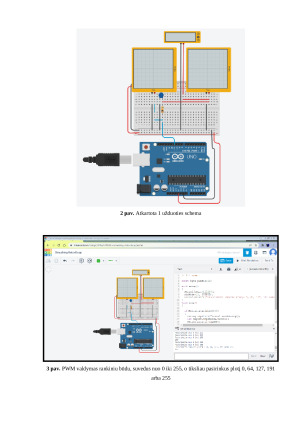
1.Sukurkite projektą su „Arduino“ ir „Breadboard“ elementais. Prie 11 pino prijunkite
rezistorių (10 kΩ) ir oscilografą (scope). Prie likusio rezistoriaus išvado prijunkite kitą
oscilografą, voltmetrą (multimeter) ir kondensatorių (capacitor 10 µF). Kondensatoriaus
likusį išvadą ir prietaisų "negative" išvadus prijunkite prie GND (1 pav.). Taip prijungtas
rezistorius ir kondensatorius sudaro žemųjų dažnių filtrą (ŽDF) arba, žiūrint
matematiškai, tai būtų signalą integruojanti grandinė. Parametrai parinkti taip, kad
išėjime turėtume įėjimo signalo vidurkį. Pasinaudodami PWM signalu ir ŽDF
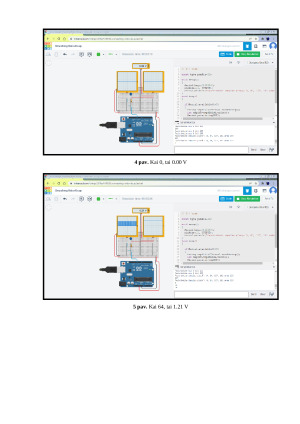
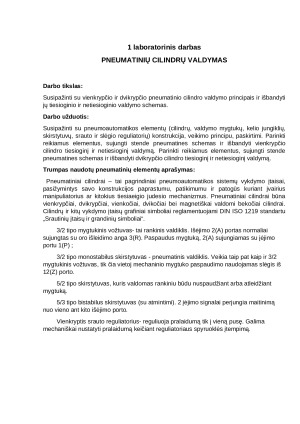
susikonstravome paprasčiausią skaičius-analogas keitiklį. Sukurkite programą, kuri per
"Serial Monitor" valdytų impulso plotį, o tuo pačiu ir išėjimo įtampos vertę.
Mūsų mokslo darbų bazėje yra daugybė įvairių mokslo darbų, todėl tikrai atrasi sau tinkamą!


Svetainė naudinga. Visada galima rasti medžiagos ir pritaikyti rašant darbus.

Platus pasirinkimas, didelė pagalba mokantiems ir besimokantiems, leidžia sutaupyti laiką ir pasisemti naujų idėjų. Ačiū

Labai gera svetainė,kai nėra idėjų referatui ši svetainė labai padeda.

Gali rasti naudingos medžiagos. Reikalui esant ją persitvarkyti pagal save. Ačiū

Ačiū, kad esat.Didelis pasirinkimas. Mielai naudojuosi. Labai susitaupo laikas.

Puiki svetainė, gerai, kad yra iš kur pasisemti pavyzdžių, kai galva jau nebeveikia :)