Konvoliucinių neuroninių tinklų rezultatų analizė remiantis vizualizacijos metodai








Detali informacija
Ištrauka
Konvoliucinių neuroninių tinklų rezultatų analizė remiantis vizualizacijos metodais
Bakalauro baigiamasis darbas
Santrauka
Dirbtiniai neuroniniai tinklai daugelyje sričių yra tapę viena pažangiausių ir naudojamiausių
technologijų, tačiau naudojama „juodosios‑dėžės” architektūra kelia sunkumus jų taikymui rea‑
laus gyvenimo srityse, kuriose sprendimų saugumas ir skaidrumas yra svarbūs. Neuroninių tinklų
vizualizacijos šią problemą sumažina, nes padeda užtikrinti atskaitomybę, teisingumą, įstatymų
ir taisyklių laikymąsi, bei saugumą diegiant dirbtinio intelekto sistemas. Šiame darbe apmokomi
trys skirtingo našumo YOLOv8 klasifikacijos modeliai bei kuriami ir lyginami jų išvesčių klasių
aktyvacijų žemėlapiai, taikomi pikselių skaičiaus, vidutinio kvadratinio nuokrypio, struktūrinio
panašumo indekso ir histogramų sankirtos metodai, kuriais gautos metrikos buvo naudojamos
ieškoti koreliacijos tarp klasių aktyvacijų žemėlapių ir konkrečių rezultatų pasitikėjimo įverčių.
Ant visų trijų modelių taikyti EigenCAM žemėlapiai buvo lyginami pagal aprašytus nuotraukų
apdorojimo būdus, tačiau neparodė nei vienos stiprios priklausomybės tarp naudotų metodų ir
pasitikėjimo įverčių. Tai paneigia hipotezę, jog galima naudotis konvoliucinių neuroninių tinklų
vizualizacijomis, norint tiksliai nustatyti YOLOv8 konvoliucinio neuroninio tinklo konkretaus
rezultato tikslumą FF++ duomenų rinkiniui. Taip pat buvo ieškoma koreliacijos tarp rezultatų
tikslumo ir kvantilių aktyvacijų EigenCAM žemėlapiuose. Gautas rezultatas, jog naudotame duo‑
menų rinkinyje 60‑asis kvantilis yra svarbiausias analizuojant klasių aktyvacijų žemėlapių vaizdo sritis.
Turinys
ĮVADAS 5
1. LITERATŪROS APŽVALGA IR PAGRINDINĖ INFORMACIJA 7
1.1. Dirbtiniai neuroniniai tinklai 7
1.2. Vizualizavimo metodų svarba 7
1.3. Modelio vertinimo metrikos 9
1.3.1. Globalūs našumo rodikliai 9
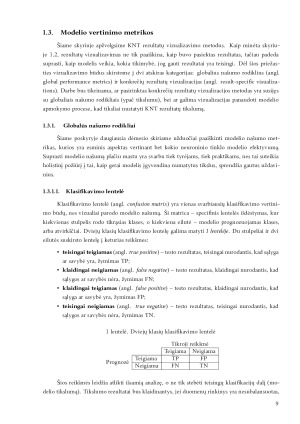
1.3.1.1. Klasifikavimo lentelė 9
1.3.1.2. Nuostolių kreivės 10
1.3.1.3. Tikslumas 10
1.3.2. Rezultatų vizualizavimas 11
1.3.3. Kvantiliai 12
1.4. YOLO apžvalga 13
1.5. Vizualizacijų lyginimo metodai 14
1.6. Koreliacija 16
2. METODOLOGIJA IR IMPLEMENTACIJA 17
2.1. Duomenų rinkinio apžvalga 17
2.2. Modelių mokymas 18
2.3. Modelių rezultatai 19
2.4. Lyginimo metodų implementacija 21
2.4.1. Pikselių skaičius 21
2.4.2. Vidutinis kvadratinis nuokrypis 22
2.4.3. Struktūrinio panašumo indeksas 22
2.4.4. Histogramų sankirta 23
2.5. Kvantilių aktyvacijų skaičiavimas 24
2.6. Klasių aktyvacijų žemėlapis 24
REZULTATAI 26
IŠVADOS 28
ŠALTINIAI 29
Įvadas
Dirbtiniai neuroniniai tinklai yra tapę viena pažangiausių ir naudojamiausių technologijų
daugelyje sričių, įskaitant, tačiau neapsiribojant, vaizdų klasifikavimu [SMV+19], objektų aptiki‑
mu [JCQ23] vaizduose ir kitose. Užduotyse, susijusiose su vaizdais ar vaizdo įrašais, konvoliuci‑
niai neuroniniai tinklai (KNT) įrodė esantys ypač veiksmingi, nes buvo specialiai kurti darbui su
tinkliniais (angl.grid‑like) duomenimis, pavyzdžiui, nuotraukomis. Nors konvoliuciniai neuro‑
niniai tinklai yra pasiekę sėkmę įvairiose srityse, jų veikimo skaidrumo trūkumas neretai trukdo
suprasti jų elgesį ir prognozes [MSH22]. Ši problema riboja KNT sistemų taikymą realaus gy‑
venimo srityse, kuriose sprendimų saugumas ir skaidrumas yra svarbūs, pavyzdžiui, robotikoje,
automatizavime ar medicinoje, kur pasitikėti juodosios dėžės (angl.black‑box) sistema yra beveik
neįmanoma, nes suprasti, kaip priimami sprendimai yra ypač svarbu – „jei naudotojai nepasitiki
modeliu ar jo prognoze, jie jo nenaudos“ [RSG16]. Tokiose programose veiksmingi vizualizavi‑
mo metodai tampa vis svarbesni, kad butų galima interpretuoti jų priimtus sprendimus [LPK21].
Dėl šių priežasčių, paaiškinamasis dirbtinis intelektas (angl.explainable artificial intelligence) yra
aktyvi ir sparčiai auganti mokslinių tyrimų sritis, kurią stengiamasi tirti ir taikyti vis dažniau
[SMV+19].
Kadangi modelio interpretacija pasitelkiant vizualizacijos metodus daugelyje sistemų yra
ignoruojamas žingsnis, tinkamai panaudotas jis gali ne tik padėti su rezultatų įžvalgomis, tačiau ir
pagerinti sistemų veikimą, padidinti jų patikimumą, parodyti tinklo veikimo principus kiekvienu
laiko tarpu [MSH22].
Šio darbo tikslas ‑ atsakyti į klausimą, ar konvoliucinio neuroninio tinklo rezultatų vizuali‑
zacijos yra susijusios su tinklo tikslumu, bei pasiūlyti ir ištirti metodą, naudojantį konvoliucinio
neuroninio tinklo rezultatų vizualizacijas ir galintį įvertinti neuroninio tinklo konkretaus rezul‑
tato tikslumą. Tai leis tiksliau suprasti konkretaus neuroninio tinklo kokybę bei patikimumą,
gautus įverčius lyginti su tikraisiais našumo rodikliais, gautais mokymo ir validacijos etapais.
Darbo uždaviniai:
1.Pasirinkti...
Mūsų mokslo darbų bazėje yra daugybė įvairių mokslo darbų, todėl tikrai atrasi sau tinkamą!
Panašūs darbai











Svetainė naudinga. Visada galima rasti medžiagos ir pritaikyti rašant darbus.

Platus pasirinkimas, didelė pagalba mokantiems ir besimokantiems, leidžia sutaupyti laiką ir pasisemti naujų idėjų. Ačiū

Labai gera svetainė,kai nėra idėjų referatui ši svetainė labai padeda.

Gali rasti naudingos medžiagos. Reikalui esant ją persitvarkyti pagal save. Ačiū

Ačiū, kad esat.Didelis pasirinkimas. Mielai naudojuosi. Labai susitaupo laikas.

Puiki svetainė, gerai, kad yra iš kur pasisemti pavyzdžių, kai galva jau nebeveikia :)